







フィードバック制御を用いた制御法のひとつにPID制御があります。
✔学習内容
・P制御、PI制御、PID制御の違い
・むだ時間とは
・例題(令和3年度技術士一次試験[専門科目] 機械部門 Ⅲ-13)
出力値に対して、目標値との偏差(Propotional)や偏差の積分値(Integral)、微分値(Differential)を用いて制御を行うことで理想的に目標値を得るものです。
ページコンテンツ
P制御(比例制御)
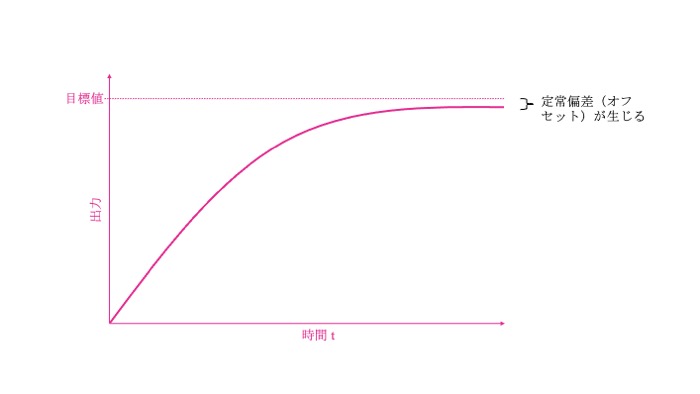
P制御はもっとも基本となる制御です。
現在の出力値と目標値の偏差に比例した調節を行います。
偏差が大きければ出力値を目標値に向けて大きく操作し、偏差が小さくなれば、操作量も小さくなります。
P制御では、偏差が小さすぎる場合に誤差の範囲内となり、これ以上操作ができなくなる問題があります。
このときの偏差を定常偏差(オフセット)と呼びます。
PI制御(比例・積分制御)

PI制御ではP制御に加えて、積分動作のフィードバック(I制御)を行います。
(目標値に近づける制御自体はP制御がベースになっています。I制御単体で用いられることは基本的にありません。)
I制御は、定常偏差の除去を目的とした制御です。
P制御で問題となった定常偏差があった場合、I制御にて偏差の積分値に比例した操作をします。
PID制御(比例・積分・微分制御)

PI制御にさらに微分動作のフィードバック(D制御)を加えることで、応答時間を減らします。
D制御は応答性の向上を目的とした制御です。
微分動作では、前回の偏差と今回の偏差の差分に比例した操作を行います。
偏差の変化によって、操作量が大きく変化するので俊敏に応答するようになります。
また、外的要因で出力が変化した場合でも、瞬時に目標値に戻るよう制御するメリットもあります。
PD制御(比例・微分制御)
P制御に加えて、D制御を行う制御です。
応答性はよいですが、定常偏差が生じてしまいます。
むだ時間

操作を行っても、応答が全くないことがあります。
操作行ってから、何らかの応答があるまでの時間をむだ時間と呼びます。
むだ時間はあらゆる系に存在し、これを低減したり正確に予測することが行われています。
問題
問題画像は公益社団法人日本技術士会ホームページからダウンロードしたものです。
【令和3年度技術士一次試験[専門科目] 機械部門 Ⅲ-13】
![令和3年度技術士一次試験[専門科目] 機械部門 Ⅲ-13 問題](https://densya-nazenani.com/wp-content/uploads/2022/03/Professional-Engineer-Exam-R3-13.png)
【解答】
各制御の目的は以下の通りです。
PI制御:定常偏差の除去
PD制御:応答性の向上
PID制御:定常偏差の除去&応答性の向上
正解は③です。
まとめ

今回は、PID制御について学習しました。
P制御やPI制御、PID制御、PD制御それぞれの特徴を理解して、問題演習を積みましょう。
過去問を完璧に解けるように繰り返し解くことが、技術士一次試験合格の近道です。













